|
图纸
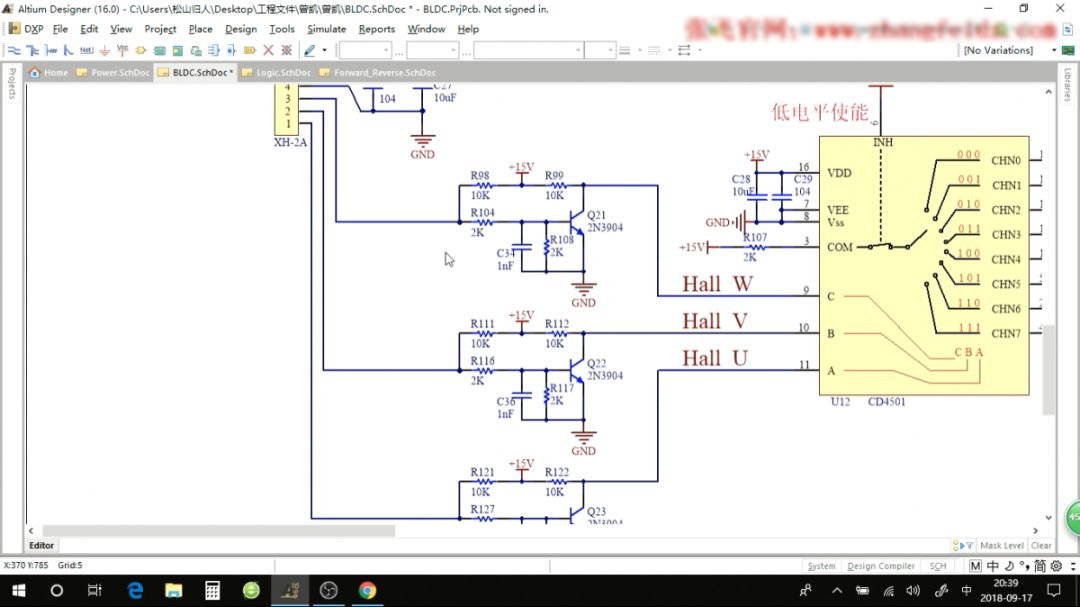
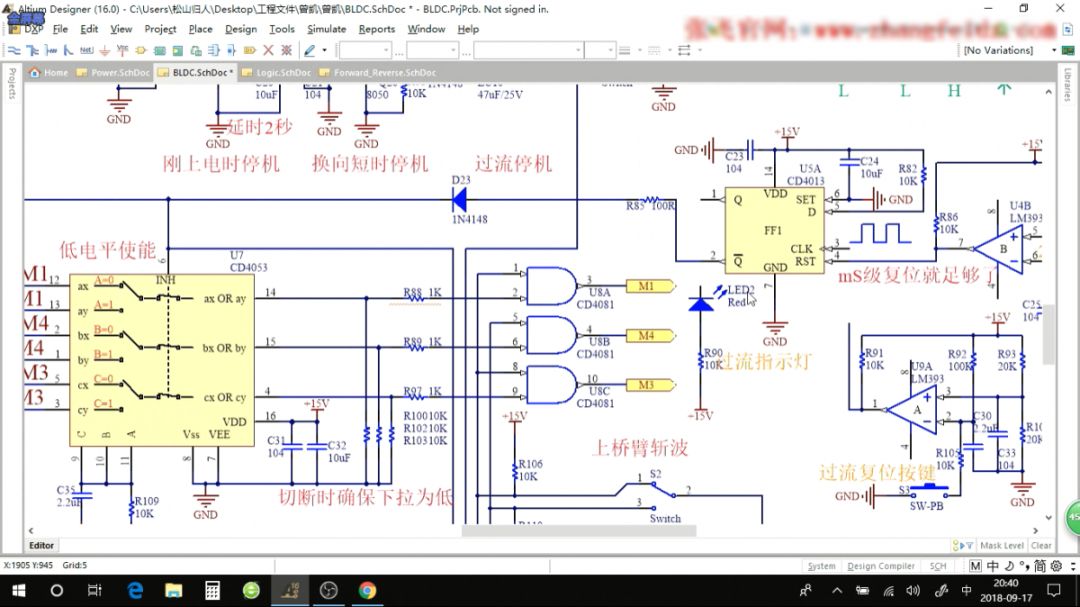
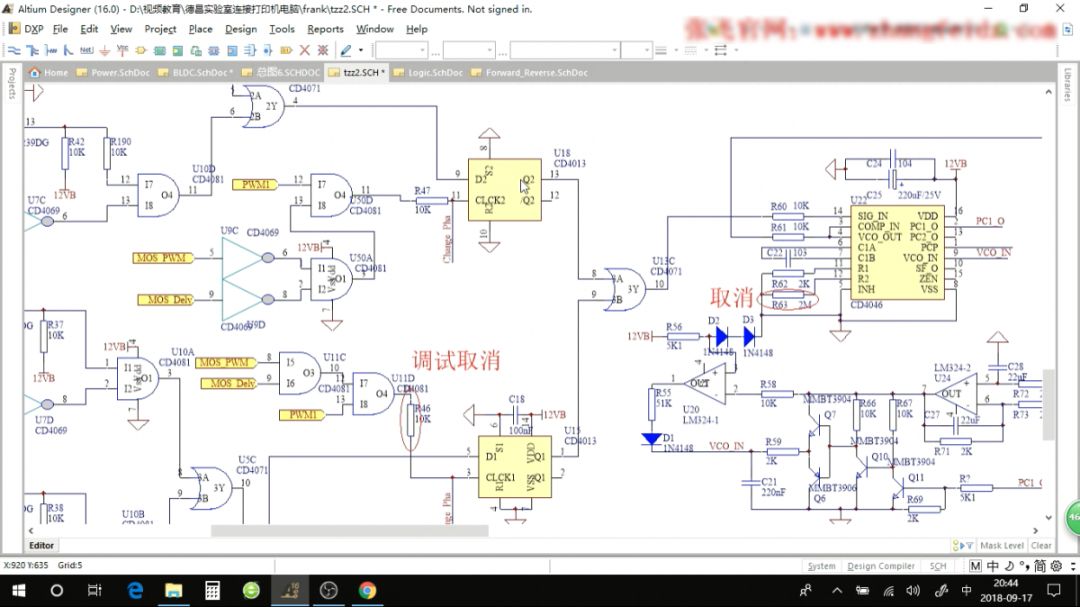
上面所说的电路方案是通过有位置搭建的,采用霍尔的方式,如下图,霍尔的信号通过多路选择开关,将三路霍尔信号转换成六路输出,六路信号通过与或门电路输出再送到CD4053模拟开关,再经过CD4081输出控制M1、M4、M3,进而控制MOS管的开通和关断,以上所说的是有位置的方波电路,当然还有其他的方案电路,比如有位置正弦波、无位置方波、无位置正弦波。
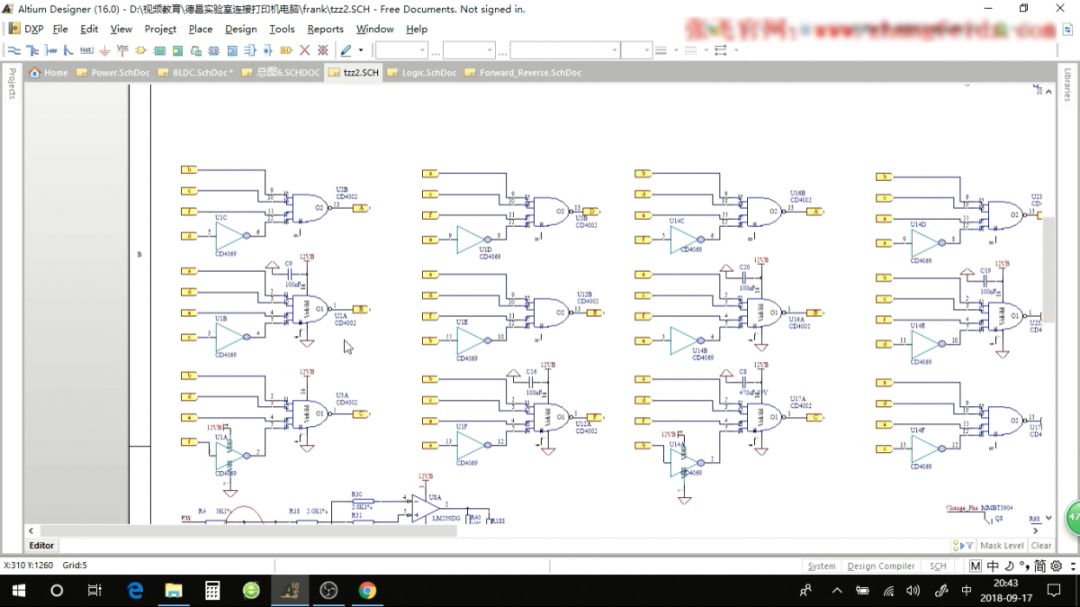
下面再给大家简单介绍一下无位置的三相马达电路,这个电路就复杂了些。 如下图所示,这是一个译码电路,马达转起来之后,需要将无霍尔转换成有霍尔,虚拟出一个霍尔,进而判断出它的位置,以及到下一项如何导通,根据当前的导通相序推出下一个导通相序。
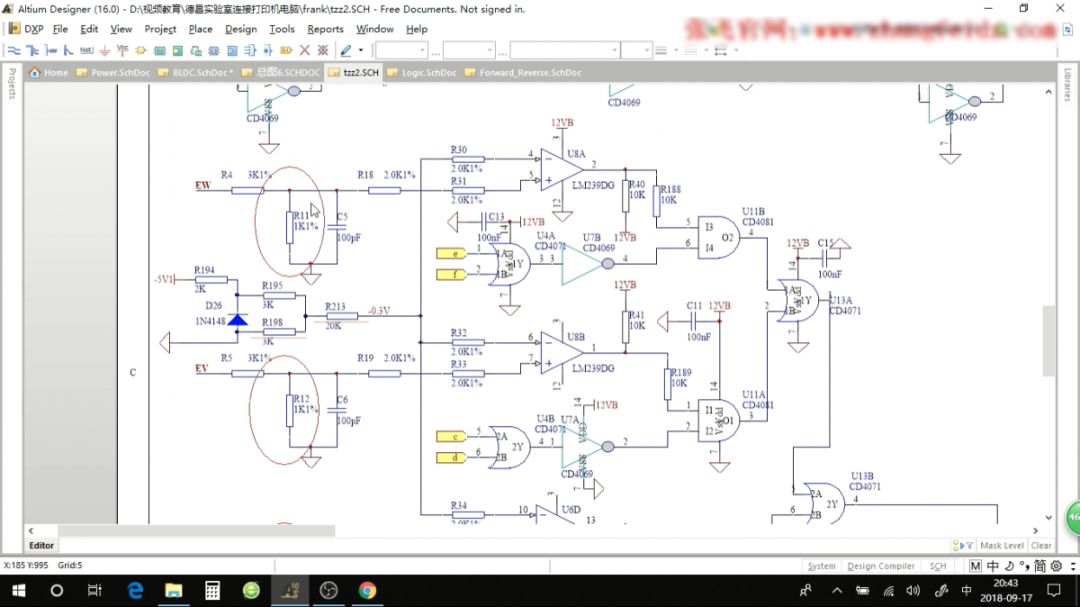
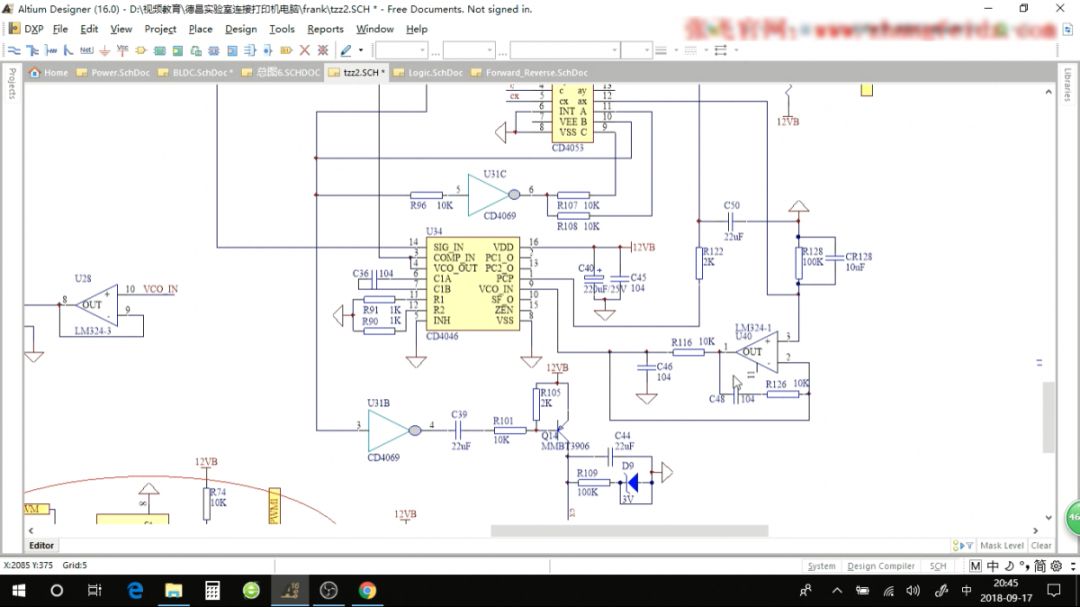
下图的这个电路是抓取当前相线的反电动势,低转速时采用电流检测法来做,高转速时,则采用电压检测法来做。最后再将高速、低速这两项进行合成,合成之后进行锁相环跟踪,跟踪后面需要进行换向和位置的储存。
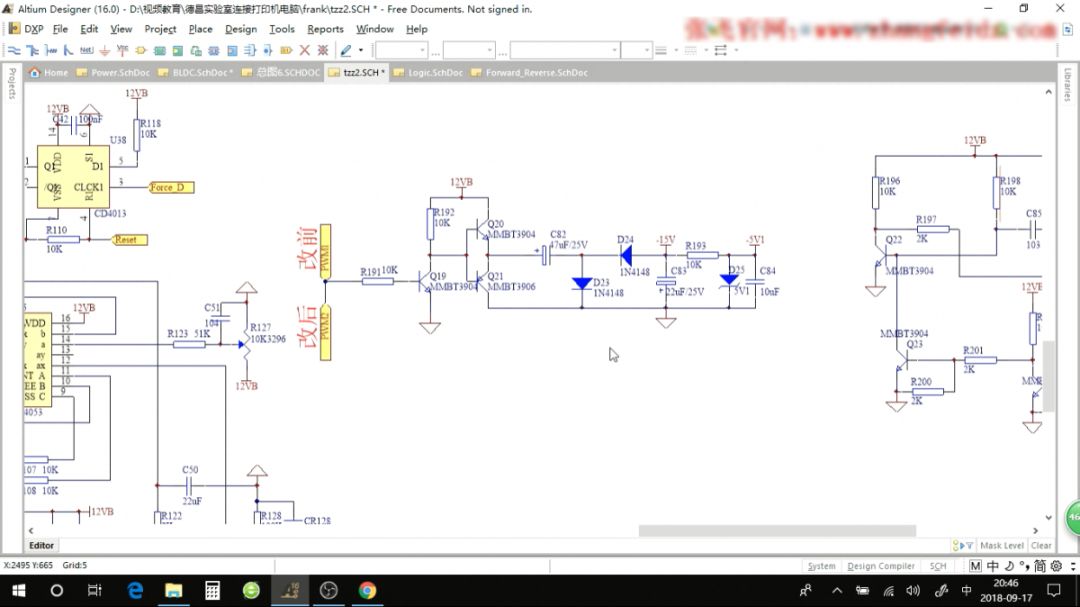
下面的这个电路是实现电机的强拖,拖到一定程度之后需要替换。
下面这个电路是实现负压,在低转速时需要用到负压。
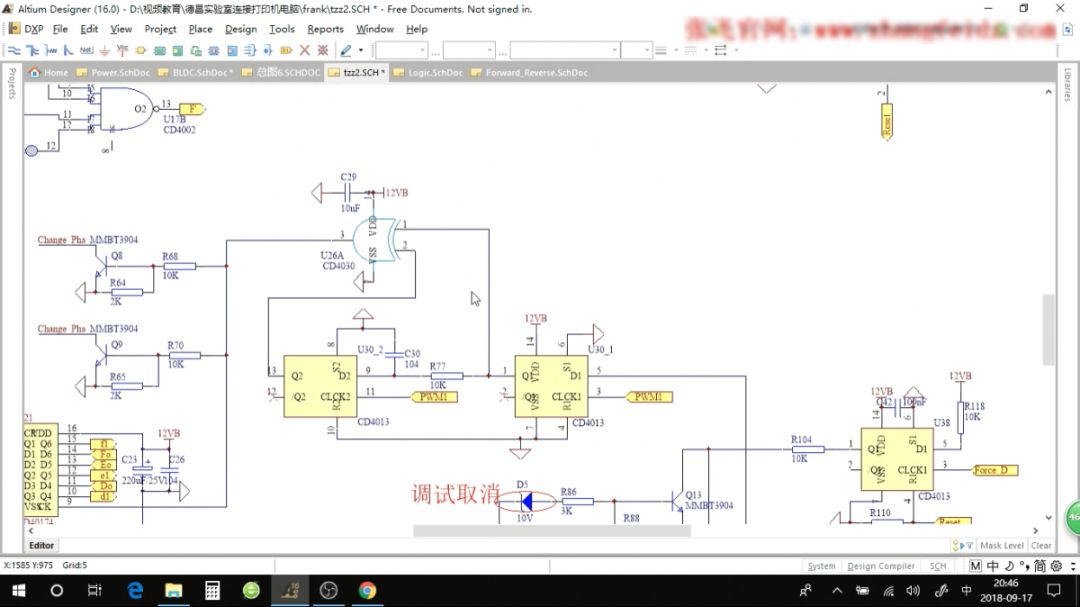
下面的这个电路是实现的消隐,马达在每次换向之后都需要进行消隐,是不能采集的。
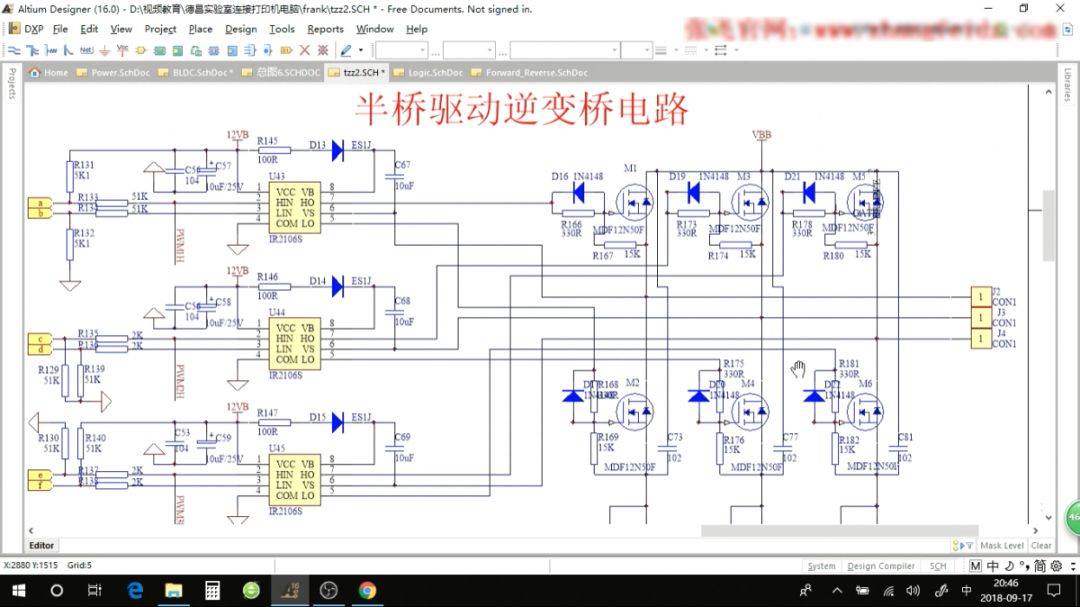
下面的电路是三相桥电路。
|
 平衡压力、高压压力和低压压力是空调维修的
平衡压力、高压压力和低压压力是空调维修的 打磨型号的集成电路求助
打磨型号的集成电路求助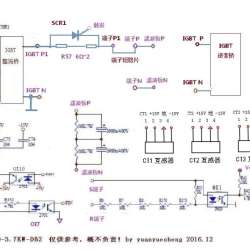 三菱变频器A540电路图(包含电源,驱动 保
三菱变频器A540电路图(包含电源,驱动 保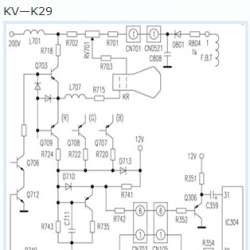 索尼KV-F29 、KV-K29 、KV-J29 型号图像暗
索尼KV-F29 、KV-K29 、KV-J29 型号图像暗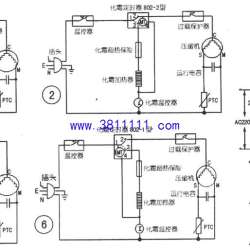 上菱BCD-180W无霜电冰箱烧坏风扇电机故障检
上菱BCD-180W无霜电冰箱烧坏风扇电机故障检 实战冰箱冰柜维修现场维修经验
实战冰箱冰柜维修现场维修经验 仿白金机维修及驱动板电路图参数
仿白金机维修及驱动板电路图参数 高压放电拉弧点火模块
高压放电拉弧点火模块 户户通主芯片植锡成功
户户通主芯片植锡成功 第三代中9户户通机顶盒各种模块刷机串口,
第三代中9户户通机顶盒各种模块刷机串口,