 |
3333333333333333333333
ЪгОѕЕМКНЖЈЮЛЯЕЭГЕФЙЄзїдРэ МђЕЅЫЕРДОЭЪЧЖдЛњЦїШЫжмБпЕФЛЗОГНјааЙтбЇДІРэЃЌЯШгУЩуЯёЭЗНјааЭМЯёаХЯЂВЩМЏЃЌНЋВЩМЏЕФаХЯЂНјаабЙЫѕЃЌШЛКѓНЋЫќЗДРЁЕНвЛИігЩЩёОЭјТчКЭЭГМЦбЇЗНЗЈЙЙГЩЕФбЇЯАзгЯЕЭГЃЌдйгЩбЇЯАзгЯЕЭГНЋВЩМЏЕНЕФЭМЯёаХЯЂКЭЛњЦїШЫЕФЪЕМЪЮЛжУСЊЯЕЦ№РДЃЌЭъГЩЛњЦїШЫЕФзджїЕМКНЖЈЮЛЙІФмЁЃ
1ЃЉЩуЯёЭЗБъЖЈЫуЗЈЃК2D-3DгГЩфЧѓВЮЁЃ ДЋЭГЩуЯёЛњБъЖЈжївЊга Faugeras БъЖЈЗЈЁЂTscai СНВНЗЈЁЂжБНгЯпадБфЛЛЗНЗЈЁЂеХе§гбЦНУцБъЖЈЗЈКЭ WengЕќДњЗЈЁЃздБъЖЈАќРЈЛљгк Kruppa ЗНГЬздБъЖЈЗЈЁЂЗжВуж№ВНздБъЖЈЗЈЁЂЛљгкОјЖдЖўДЮЧњУцЕФздБъЖЈЗЈКЭ Pollefeys ЕФФЃдМЪјЗЈЁЃЪгОѕБъЖЈгаТэЫЬЕТЕФШ§е§НЛЦНвЦЗЈЁЂРюЛЊЕФЦНУце§НЛБъЖЈЗЈКЭ Hartley а§зЊЧѓФкВЮЪ§БъЖЈЗЈЁЃ 2ЃЉЛњЦїЪгОѕгыЭМЯёДІРэЃК a.дЄДІРэЃКЛвЛЏЁЂНЕдыЁЂТЫВЈЁЂЖўжЕЛЏЁЂБпдЕМьВтЁЃЁЃЁЃ b.ЬиеїЬсШЁЃКЬиеїПеМфЕНВЮЪ§ПеМфгГЩфЁЃЫуЗЈгаHOUGHЁЂSIFTЁЂSURFЁЃ c.ЭМЯёЗжИюЃКRGB-HISЁЃ d.ЭМЯёУшЪіЪЖБ№ 3ЃЉЖЈЮЛЫуЗЈЃКЛљгкТЫВЈЦїЕФЖЈЮЛЫуЗЈжївЊгаKFЁЂSEIFЁЂPFЁЂEKFЁЂUKFЕШЁЃ вВПЩвдЪЙгУЕЅФПЪгОѕКЭРяГЬМЦШкКЯЕФЗНЗЈЁЃвдРяГЬМЦЖСЪ§зїЮЊИЈжњаХЯЂ,РћгУШ§НЧЗЈМЦЫуЬиеїЕудкЕБЧАЛњЦїШЫзјБъЯЕжаЕФзјБъЮЛжУ,етРяЕФШ§ЮЌзјБъМЦЫуашвЊдкбгГйвЛИіЪБМфВНЕФЛљДЁЩЯНјааЁЃИљОнЬиеїЕудкЕБЧАЩуЯёЭЗзјБъЯЕжаЕФШ§ЮЌзјБъвдМАЫќдкЕиЭМжаЕФЪРНчзјБъ,РДЙРМЦЩуЯёЭЗдкЪРНчзјБъЯЕжаЕФЮЛзЫЁЃетжжНЕЕЭСЫДЋИаЦїГЩБО,ЯћГ§СЫРяГЬМЦЕФРлЛ§ЮѓВю,ЪЙЕУЖЈЮЛЕФНсЙћИќМгОЋШЗЁЃДЫЭт,ЯрЖдгкСЂЬхЪгОѕжаЩуЯёЛњМфЕФБъЖЈ,етжжЗНЗЈжЛашЖдЩуЯёЛњФкВЮЪ§НјааБъЖЈ,ЬсИпСЫЯЕЭГЕФаЇТЪЁЃ ЖЈЮЛЫуЗЈЛљБОЙ§ГЬЃК МђЕЅЕФЫуЗЈЙ§ГЬЃЌПЩЛљгкOpenCVНјааМђЕЅЪЕЯжЁЃ ЪфШы ЭЈЙ§ЩуЯёЭЗЛёШЁЕФЪгЦЕСїЃЈжївЊЮЊЛвЖШЭМЯёЃЌstereo VOжаЭМЯёМШПЩвдЪЧВЪЩЋЕФЃЌвВПЩвдЪЧЛвЖШЕФ ЃЉЃЌМЧТМЩуЯёЭЗдкtКЭt+1ЪБПЬЛёЕУЕФЭМЯёЮЊItКЭIt+1ЃЌЯрЛњЕФФкВЮ,ЭЈЙ§ЯрЛњБъЖЈЛёЕУЃЌПЩвдЭЈЙ§matlabЛђепopencvМЦЫуЮЊЙЬЖЈСПЁЃ ЪфГі МЦЫуУПвЛжЁЯрЛњЕФЮЛжУ+зЫЬЌ ЛљБОЙ§ГЬ Ёё ЛёЕУЭМЯёIt,It+1 Ёё ЖдЛёЕУЭМЯёНјааЛћБфДІРэ Ёё ЭЈЙ§FASTЫуЗЈЖдЭМЯёItНјааЬиеїМьВтЃЌЭЈЙ§KLTЫуЗЈИњзйетаЉЬиеїЕНЭМЯёIt+1жаЃЌШчЙћИњзйЬиеїгаЫљЖЊЪЇЃЌЬиеїЪ§аЁгкФГИіуажЕЃЌдђжиаТНјааЬиеїМьВт Ёё ЭЈЙ§ДјRANSACЕФ5ЕуЫуЗЈРДЙРМЦСНЗљЭМЯёЕФБОжЪОиеѓ Ёё ЭЈЙ§МЦЫуЕФБОжЪОиеѓНјааЙРМЦR,t Ёё ЖдГпЖШаХЯЂНјааЙРМЦЃЌзюжеШЗЖЈа§зЊОиеѓКЭЦНвЦЯђСП |
 2019зюаТЃЁРжЪгS50AIRГЌМЖЕчЪгШЋЯЕСаЫЂЛњШЅ
2019зюаТЃЁРжЪгS50AIRГЌМЖЕчЪгШЋЯЕСаЫЂЛњШЅ бѕЦјДЋИаЦї O2S-FR-T4-5P-387ЬсИпСЫеєПОЯф
бѕЦјДЋИаЦї O2S-FR-T4-5P-387ЬсИпСЫеєПОЯф вЛжжШЦжЦЮЂаЭБфбЙЦїЕФЗНЗЈ
вЛжжШЦжЦЮЂаЭБфбЙЦїЕФЗНЗЈ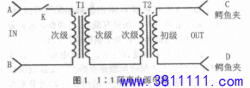 зджЦаоЕчДХТЏЕФКУЙЄОпЛњФкМйИКди
зджЦаоЕчДХТЏЕФКУЙЄОпЛњФкМйИКди ЪЎИіМвЕчЮЌаоММЧЩвЛЖЈвЊПД
ЪЎИіМвЕчЮЌаоММЧЩвЛЖЈвЊПД ецГЯЧѓжњЃЁЃЁЃЁ
ецГЯЧѓжњЃЁЃЁЃЁ ЕчФдПЊЛњНјВЛСЫЯЕЭГ
ЕчФдПЊЛњНјВЛСЫЯЕЭГ аЁУз65ДчЕчЪгБГЙтКкЦСЙЪеЯЕФЮЌао
аЁУз65ДчЕчЪгБГЙтКкЦСЙЪеЯЕФЮЌао зЪСЯЗжЯэ
зЪСЯЗжЯэ Ш§СтБфЦЕЦїA540ЕчТЗЭМЃЈАќКЌЕчдДЃЌЧ§ЖЏ БЃ
Ш§СтБфЦЕЦїA540ЕчТЗЭМЃЈАќКЌЕчдДЃЌЧ§ЖЏ БЃ
 |УХЛЇЕиЭМ|ЪжЛњАц|аЁКкЮн|МвЕчЮЌаоТлЬГ
( ЪёICPБИ14030498КХ )
|УХЛЇЕиЭМ|ЪжЛњАц|аЁКкЮн|МвЕчЮЌаоТлЬГ
( ЪёICPБИ14030498КХ )
GMT+8, 2024-5-24 01:47
Powered by Discuz! X3.4
Copyright © 2001-2021, Tencent Cloud.





